M.2 Multifunction Analog I/O
M.2 Multifunction High-Speed Analog I/O Cards
Ever expanding M.2 card lineup targets a wide array of applications
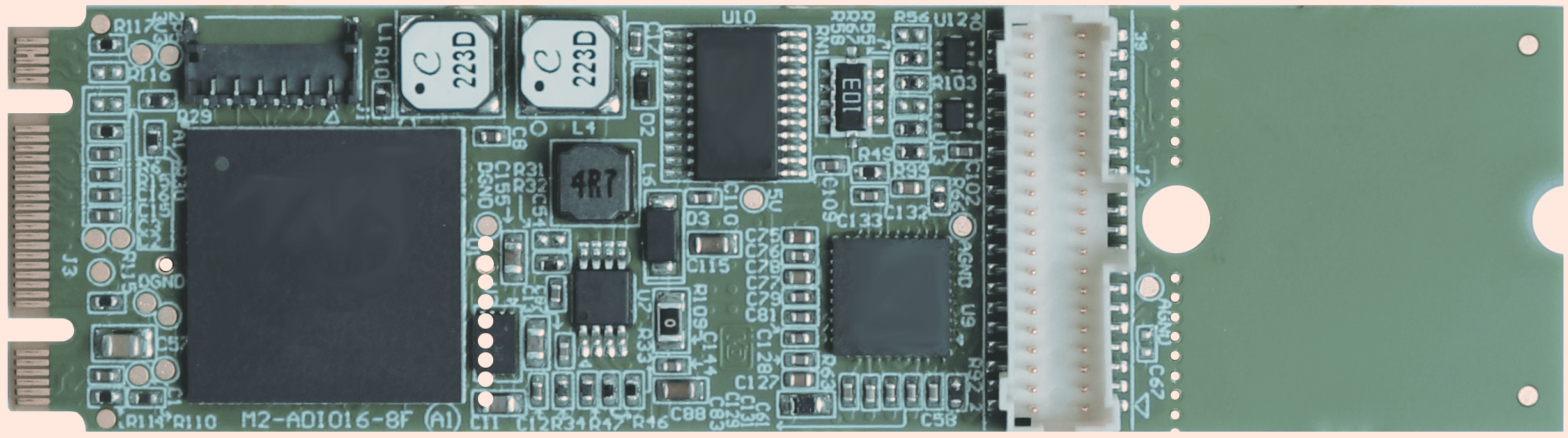
SAN DIEGO, CA—ACCES I/O Products announces the immediate release of a new family of M.2 multifunction analog I/O cards— the M.2-ADIO Family. This innovative line of 12 and 16-bit M.2 models starts with its flagship model, the M.2-ADIO16-8FDS. This high-speed, 16-bit multifunction analog input/output board is ideal for precision measurement, analysis, monitoring, and control in countless embedded applications. The M.2-ADIO16-8FDS can sample at speeds up to 1MHz for the board’s eight single-ended or four differential analog input channels. Standard features in the M.2-ADIO Family include four 16-bit analog outputs and 16 high-current digital I/O lines—all in the ultra-small M.2 2260/2280 embedded form factor (NVME compatible). Striking an excellent price/performance value, this family of boards also includes models with slower A/D speeds, no analog outputs, and a group of 12-bit modules for less demanding applications.
The M.2-ADIO Family includes over a dozen models with list prices ranging from only $249 to $669, an unprecedented value. The cards feature seven software-selectable per-channel analog voltage input ranges, including 4-20 and 10-50mA current inputs (factory options). This channel-by-channel programmable gain feature enables measurement of an assortment of large and small signals in one scan—all under software control at up to 1MHz. 4 kSample FIFO+DMA-driven data is optimum where high data rates must be sustained for short—or long— periods of time.
The four analog outputs each have five software selectable ranges and can drive loads up to 10mA. The flagship FDS model adds hardware-paced 8 kSample FIFO+DMA-driven Streaming Waveform Playback on one, two, three, or all four DACs, at any aggregate rate up to 1Msps.
The 16 digital I/O lines can be used independently as simple input or output, external ADC trigger, ADC start conversion, DAC trigger (LDAC), watchdog status output, and more.
The cards are designed for use in harsh and rugged environments, including military and defense, as well as commercial and industrial applications like medical devices, point of sale systems, kiosk design, retail, hospitality, automation, and gaming.
Key features of the M.2-AIO Family include:
- 2 Type B/M 2260/2280, with latching I/O connector
- 16-bit, bipolar, differential, A/D converter sampling at up to 1MHZ
- Software selectable as 8 single-ended or 4 differential inputs
- Seven channel-by-channel Programmable differential input ranges from ±0.3125V up to ±12V
- A/D starts via software, external input, or periodic timer
- A/D “scan start” mode optimizes inter-channel timing, reducing skew
- High Impedance, 8-channel input: 500 MΩ
- 32K FIFO plus DMA for efficient, robust data streaming
- 16 digital I/O; 8 individually configurable for input or output
- Four 16-bit analog outputs with optional 8 kSample FIFO+DMA Waveform Streaming
- 5 per-channel programmable ranges: 0-5V, 0-10V, ±2.5V, ±5V, ±10V
- Outputs drive ±10mA
- Onboard watchdog with status output
- RoHS compliant standard
All ACCES M.2 cards offer high retention latching connectors for shock and vibration mitigation as well as an optional extended operating temperature of -40°C to +85°C. The small size (M.2 2260/2280: 22mm x 60mm/80mm) allows for maximum performance in applications where space is a valuable resource. The newer M.2 form factor provides a small footprint for embedded applications where compact size is critical. This M.2 card is compatible with standard NVME sockets, common on all modern motherboards.
Factory Options Include: Extended temperature, current inputs (4-20mA, 10-50mA), voltage dividers for higher voltage inputs. Additional customization options include conformal coating, custom software / product-labeling, and more — even entirely new features, enabled by our advanced FPGA-based design!
These cards are supported for use in most operating systems and include a free Linux and Windows compatible software package. This package contains sample programs and source code in C# and Delphi for Windows. Linux support includes installation files and samples for programming level via our open-source kernel driver. Third party support includes a Windows standard DLL API library usable from most popular application programs. Embedded OS support consists of the family of Windows Operating Systems including IoT. ACCES also now offers a VxWorks driver/library for the ultimate real-time process monitoring and control solution.
For additional information, readers can view a data sheet and manual for the new M.2-ADIO Family by visiting the product webpage at https://accesio.com/product/m-2-adio16-8f/
About ACCES I/O Products, Inc.
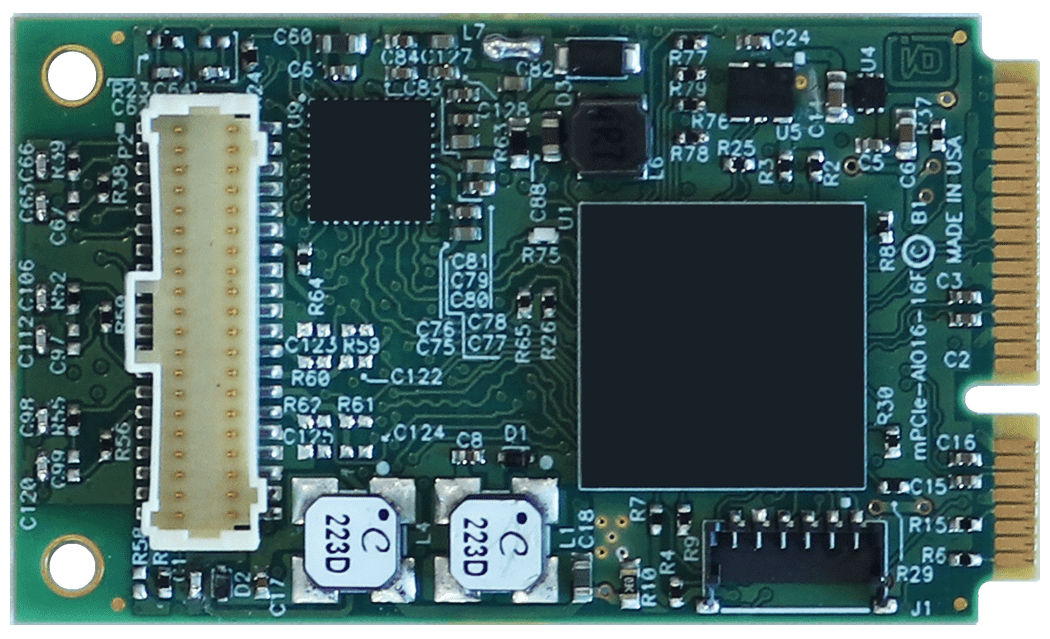
For nearly 35 years, ACCES I/O Products, Inc. has supplied an extensive range of analog, digital, serial communication, and isolated I/O boards and solutions, including a line of popular rugged USB hubs. ACCES also offers complete systems, integration services and enclosures with a quick turn-around on custom projects including software. ACCES products are designed for use with mPCIe (PCI Express Mini Card), M.2, PCI Express, PCIe/104, Ethernet, USB, PCI, PC/104, and ISA, as well as distributed, wireless I/O, and computer-on-module (COM) form factors. All hardware comes with a 30-day, no-risk return policy and a three-year warranty. For further information, visit the company’s web site at www.accesio.com.
| Price: | Prices range from $299 to $669, Please inquire for OEM and volume pricing |
| Availability: | Now |
| Delivery: | Stock to two weeks ARO |
| Card Images: | 300 dpi JPG | 300 dpi PNG |
For Further Information, Contact:
Chris Persidok
Marketing Communications Director ACCES I/O Products, Inc.
10623 Roselle Street, San Diego, CA 92121-1506
Tel: 858.550.9559
E-mail: cpersidok@accesio.com
URL: www.accesio.com
{kind=link}