M.2 Series of 55 models!
ACCES I/O Adds New Series of 55 Compact, High-Performance M.2 Cards to Its Small-Form-Factor (SFF) Data Acquisition Line
New series reflects company’s commitment to delivering state-of-the-art, highly configurable data acquisition
and control solutions; Versatile M.2 card lineup targets a wide array of applications
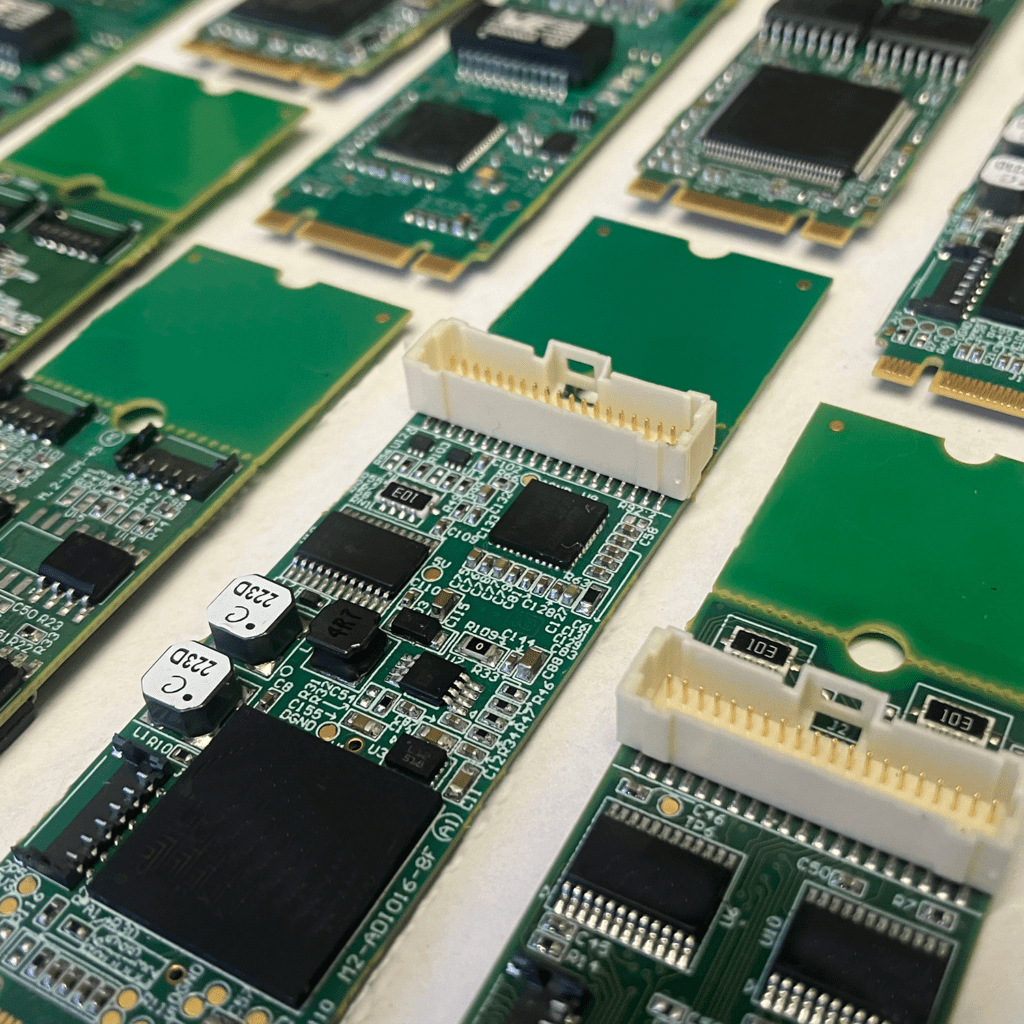
SAN DIEGO, CA – September 19, 2023 – ACCES I/O Products, a recognized industry leader in data acquisition and control technology, today announces the launch of a new series of M.2 cards. Building upon the company’s legacy of delivering compact, high-performance products, the new M.2 cards are 100% software/pinout-compatible with their mPCIe (PCI Express Mini Card) versions. Each of the 55 cards in the series is an M.2 (NVME-socket compatible) 2280 M+B keyed unit with a breakaway for 2260-sized slot compatibility. All are designed to meet the rugged requirements of MIL-STD-810 when ordered with optional industrial temperature rating and conformal coating. With their small form factor and robust capabilities, these M.2 cards are perfect for an array of applications in sectors including automation, defense, testing, process control and more.
The newly released M.2 lineup includes:
- M.2-AIO16-16FDS and M.2-ADIO16-8FDS: 16-analog input/4-analog output card and a version with 8 analog inputs. Both offer 1MHz ADCs with 1MHz aggregate waveform playback on the 4 DACs, with 16-bit resolution.
- M.2-COM-4SM, M.2-ICM232-4, M.2-ICM422-4 and M.2-ICM485-4: 4-Channel RS232/422 or 485 cards with nonvolatile software control for the protocol, supporting 3MBd or 10MBd with a custom crystal oscillator.
The M.2-ICM models are isolated versions. - M.2-LAN-GBe: A gigabit Ethernet adapter using Intel’s industry-leading I210 Ethernet chipset.
- M.2-DIO-24S and M.2-DIO-24A: 24-bit digital I/O cards. The -24A supports a flexible array of counter, pulse generation, PWM I/O and IRQ features.
- M.2-IIRO-8: 8-channel isolated digital inputs at up to 120V with 8×1A electromechanical relay outputs.
- M.2-IDIO-8, M.2-IDIO-8H and M.2-IDIO-8L: A set of 8-Channel isolated digital input, solid-state output cards equipped with 34V/2A FETs. The -8H model supports higher current, while the -8L version leverages “low-side switching” FETs.
- M.2-II-16: 16-isolated inputs supporting up to 120 V AC/DC and features switchable filters.
- M.2-QUAD-8: 32-bit 8-Channel counters offering quadrature, true-pulse and raw counting capabilities.
“In our ongoing effort to evolve with embedded technology, our new series of M.2 cards cater to the growing need for compact and powerful data acquisition solutions,” said Peter Persidok, VP of Engineering at ACCES I/O Products.
For more information on these and other products from ACCES I/O Products, visit www.accesio.com.
Price: Ranging from $208 to $859; Please inquire for OEM and volume pricing
Availability: Now
Delivery: Stock to twelve weeks ARO
Download DOCX | View as PDF | 300 dpi PNG | 300 dpi JPG
About ACCES I/O Products, Inc.
Since 1987 ACCES I/O Products, Inc. has designed and manufactured a broad line of data acquisition and control products that are used across myriad industries. Incorporated in 1992, the company has consistently focused on delivering solutions that meet the evolving needs of its customers, earning a reputation for quality, reliability, and innovation